
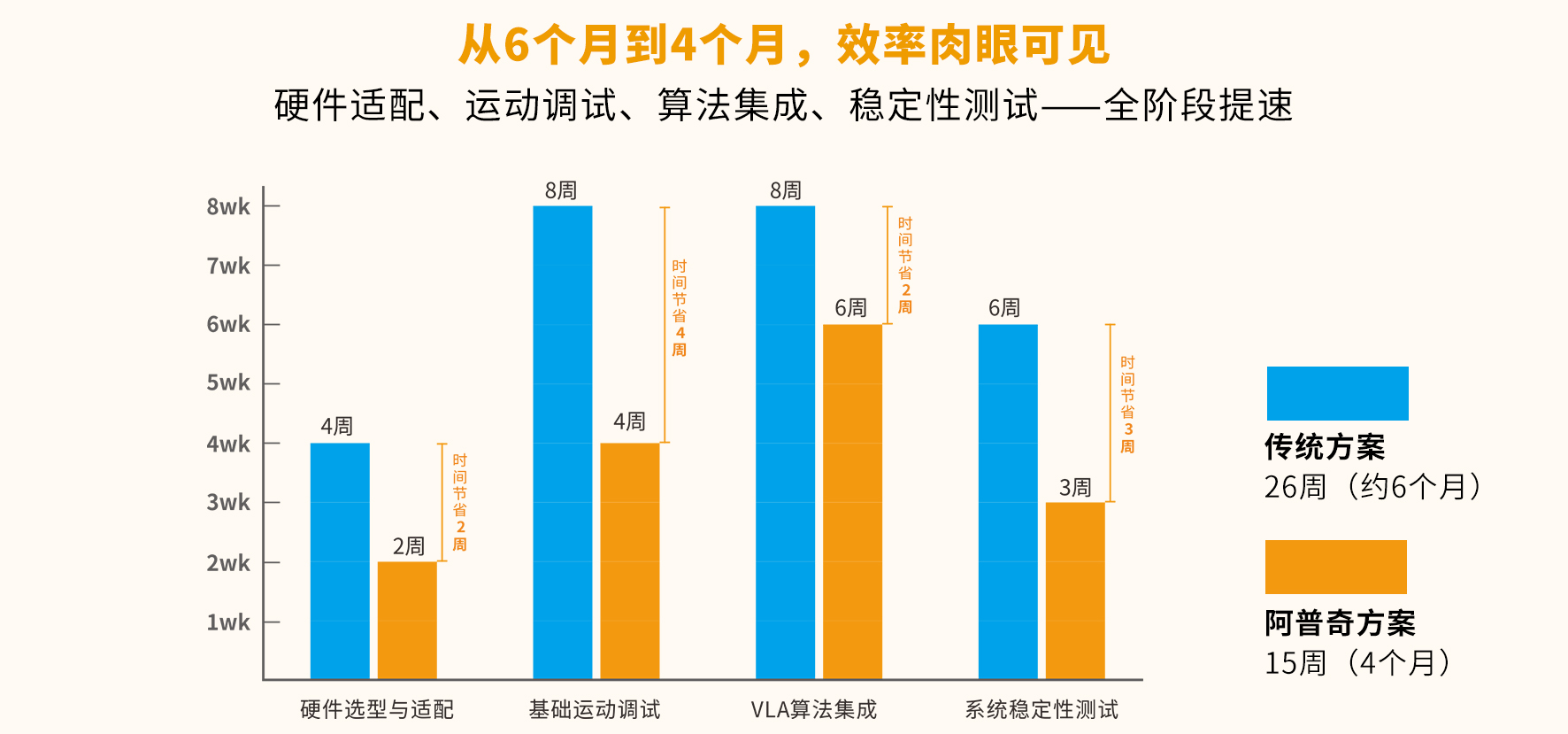
2025年10月至2026年1月,某國內頭部人形機器人集成商與阿普奇深度合作,基于AGX?Orin?+?Intel“大小腦”協同架構,在短短4個月內完成新一代雙足人形機器人樣機的開發與調試,整體開發周期較傳統模式縮短40%。

客戶背景與核心挑戰
客戶簡介
國內領先的雙足人形機器人研發與集成企業,專注于高端仿生機器人領域,產品覆蓋科研教育、特種作業、商業服務等多個場景。
核心痛點
- 開發周期過長:傳統方案中,運動控制、環境感知、決策規劃等模塊由不同供應商提供,集成調試耗時長達8–12個月。
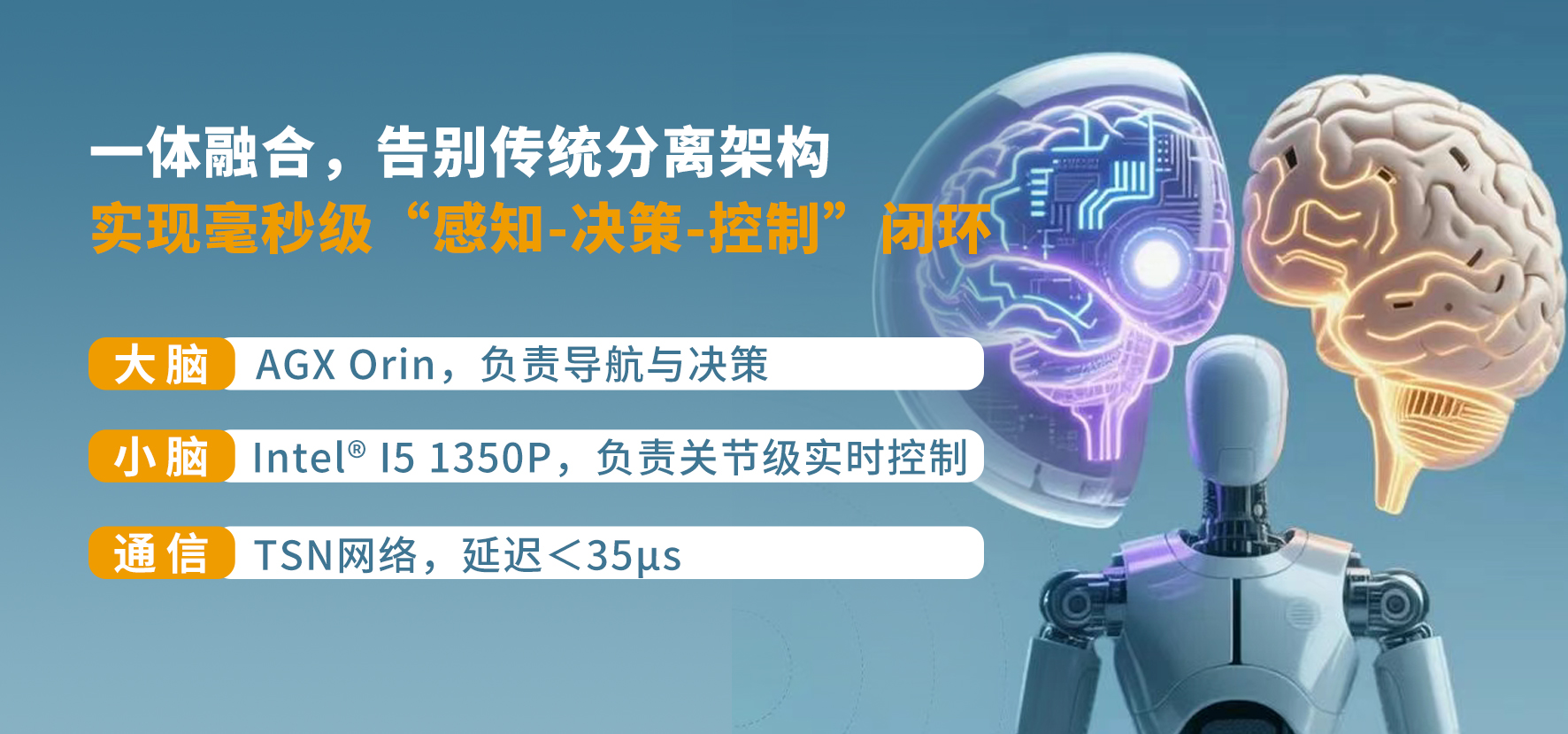
- 系統協同困難:雙足機器人需要“大腦”(決策)與“小腦”(控制)實現毫秒級協同,傳統分離架構難以支撐實時平衡與多模態感知的高效交互。
- 算法遷移成本高:從仿真到實機的算法移植與優化,常需重復適配不同硬件接口,拖慢整體進度。

阿普奇解決方案:AGX Orin + Intel“大小腦”協同架構
1. 方案設計階段(2025年10月)
需求對齊:
- 共同梳理13項核心需求,包括實時步態控制頻率≥1kHz、多傳感器同步精度≤40μs、支持ROS 2與自定義中間件雙模式等。
方案定制:
- 主控層采用AGX Orin + Intel大小腦融合控制器,集成x86高性能決策單元與實時控制單元,實現“感知-決策-控制”一體化。
- 執行層部署Intel I5 1350P作為關節協處理器,負責28個關節的伺服控制與本地自適應調節。
- 通信基于千兆TSN(時間敏感網絡),確保AGX Orin與x86小腦間延遲<35μs。
2. 快速部署階段(2025年11–12月)
- 硬件即插即用:標準電氣接口直接適配客戶現有伺服驅動器與傳感器,減少線纜定制時間。
- 軟件開箱即用:預裝Ubuntu 22.04與ROS 2系統,內置雙足機器人基礎功能包,客戶3天內即完成基礎運動配置。
- 高效協同調試:阿普奇提供“現場+遠程”雙線支持,快速解決傳感器標定等難題,大幅減少現場調試時間。
關鍵成果:開發周期縮短40%
開發時間線對比
- 控制實時性:步態控制周期從5ms提升至1ms,動態平衡響應速度提高80%。
- 開發效率:算法迭代速度提升,客戶可在7天內完成新步態的仿真-實機驗證(傳統需20天)。
- 系統穩定性:連續72小時負載測試無故障,MTBF(平均無故障時間)提升至1000小時。
?
2.標準化創造價值:硬件接口與軟件中間件的標準化,可大幅降低集成復雜度。
3.生態協作新模式:供應商應向“解決方案伙伴”轉型,深入參與客戶早期開發。
- 融合架構:AGX Orin + Intel大小腦實現決策與控制硬件層面統一,避免數據總線瓶頸。
- 彈性擴展:支持從12關節到32關節的不同構型,小腦性能可升級至I7 13700H。
- 開放生態:全面兼容ROS 2、MATLAB/Simulink等主流開發環境。
?
- 全周期陪伴:從方案設計到量產支持,提供聯合開發服務。
- 經驗共享:基于超50個機器人客戶的成功開發經驗,助力客戶快速推進。
- 快速響應:7×24小時遠程診斷 + 48小時現場支持,保障項目順利落地。

在機器人產業化加速的今天,開發效率已成為競爭的關鍵。阿普奇通過“大小腦”協同架構與深度服務,不僅助力客戶實現開發周期縮短40%,更驗證了一體化設計在復雜機器人系統中的重要價值。我們期待與更多伙伴攜手,共同推進具身智能時代的到來。
發布時間: 01-12-2026


